






أسس تجهيز الكاراكتر للحركة داخل الماكس( الجزء الثاني )
الآن حان الوقت لعمل IK
إختر أي من الفخذين وقم بالنقر على أداة الـ IK , وسترى ان أداة الـ IK أصبحت نشطة بمجرد إختيار للفخذ .
وباستخدام أداة IK سترى ان هناك خط خفيف متقطع يتبع مؤشر الفارة , وفي إنتظار إختيار سلسلة الحركة العكسية (IK)
لذا
قم الآن بالضغط على القدم الموجودة اسفل الفخذ الذي قمت باختياره سالفاً .
فإذا تم الربط بنجاح ستجد علامة زرقاء متقاطعة ظهرت في مركز دوران القدم ,
سيقوم برنامج الماكس أتوماتيكياً بعد الربط باختيار العلامة المتقاطعة ,
قم الآن بتحريكها للتأكد من نجاح تطبيق الأداة , لا تنسى بعد عمل تحريك
للقدم أن تقوم بالتراجع عن تلك الحركة لترجع القدم إلى مكانا الأساسي من
حيث بدأت .
إفعل الشئ ذاته للقدم الأخرى.
وافعل
الشئ ذاته لكل من الذراعين , وفي هذه المرة , قم اولاً باختيار أعلى
الذراع ثم أختر أداة الحركة العكسية , ثم قم باختيار اليد , وتذكر أن
تختبر حركة اليد بمجرد أن تنتهي من الربط , وبعد ذلك قم بعمل تراجع عن
الحركة لترجع اليد في مكانها الاساسي كما كانت قبل الحركة .
سنتطرق إلى تفاصيل أكثر في نقاط أكثر تفصيلا لمعرفة كيفية استخدام وضبط الحركة العكسية في دقيقة .
بعد إنتهائك من الربط للقدمين والذراعين , الآن نستطيع أن نبدأ في العمود الفقري .
سيكون
هناك إختلاف قليل في طريقة ربط العمود الفقري عن تلك التي نربط بها
القدمين والذراعين , ويرجع ذلك إلى كيفية حركة الفقرات مع بعضها .
ويجب
أن تأخذ في عين الإعتبار أننا لا نستطيع تحريك وثني القدم و الذراع بطريقة
غير طبيعية , بمعنى أن الوصلة لا تسمح بالإنحناء أكثر من 180 درجة (فمن
الطبيعي أنك إذا حركت ذراعك أكثر من ذلك فسيتم كسره) . ولكن في حالة العمود
الفقري لديك حرية أكثر في الحركة من تلك الموجودة في الذراعين , لذلك
نحتاج حل جديد لهذه المنطقة .
ملحوظة: إحفظ الملف
الحركة العكسية باستخدام المنحنيات Spline IK
وهو عبارة عن IK Solver يستخدم المنحنيات ليتحكم في الحركة , دعنا نفهم هذا المعنى أكثر .
إنتقل الآن داخل نوافذ الرؤية إلى الجهة اليسرى , وإذهب إلى قناة الإنشاء Create panel ثم Shapes ثم lines.
ماسنقوم بفعله الآن هو رسم خط يمثل العمود الفقري للشخصية , ولكن قبل أن تبدأ , سنقوم بتغيير بسيط في خصائص الخط في منطقة creation method سنقوم بضبط الإعدادات كما هو موجود في الصورة .

الآن وحين نبدأ برسم الخط , سيقوم الماكس أوتوماتيكيا بتنعيم الخط وذلك بناءا على إعداداتنا السابقة
وابدأ الخط من وسط الشخصية (مهم جدا ان تكون نقطة البدأ من هذه المنطقة) وأنشأ الشكل الموضح بالصورة التالية
لاحظ
أنه يوجد ثلاثة نقاط فقط في الشكل المرسوم واحدة للوسط وأخرى لمنتصف
العمود الفقري وثالثة لأعلى العمود الفقري , وهذه ستكون نقاط الإرتكاز
الأساسية للعمود الفقري , فإن كنت تريد نقاط أكثر في الشخصية , قم بذلك ,
ولكن تذكر أنه كلما زادت النقاط كلما زادت العناصر التي تتحكم في هذه
النقاط.
الآن
حرك المنحنى الذي رسمت إلى داخل الشخصية , وتذكر أن ذلك الخط يمثل العمود
الفقري للشخصية لذلك المكان الذي ستضعه فيه داخل الشخصية سيكون هام جداً .

وبالتالي
تأكد من أن المنحنى في مكانه السليم ايضاً من خلال المنفذ الأمامي للرؤية ,
فلابد أن يكون في منتصف الشخصية تماماً , بعد ذلك قم بإختيار الوسط (hips)
الآن قم بإضافة Spline IK Solver وذلك من قائمة Animation ثم IK Solvers ثم Spline IK Solver
الآن حرك الماوس إلى الجزء المسمى Man_Spine_3
, ولمعرفة المسمى للعنصر الذي تقوم عليه يمكنك الإنتظار لثواني عليه
بالماوس فيظهر لك مسمى العنصر الذي ستطبق عليه الربط , وبعد ذلك قم
باختيار الخط المنحنى الذي قمت بعمله منذ قليل داخل الشخصية , ستجد أن
الفقرات الثلاثة الآن تحركت لتلائم الـ IK المطبق عليها , فلا تقلق إن تحركت الفقرات , بل إنه يجب عليها ذلك .
بمجرد إنتهاء الربط بنجاح , ستظهر لك الـعناصر المساعدة (Helper Object)
أوتواتيكياً في أماكن النقاط الموجودة على الخط المنحني الممثل للعمود
الفقري الآن , لذا يمكن الآن ان تتحكم بهذه النقاط بسهولة لتحريك الشخصية .
كل ما نريد فعله الآن هو إنشاء مزيد من الأدوات المساعدة التي سوف تساعدنا في تحريك الشخصية .
ملحوظة: إحفظ الملف
التجهيز (THE RIG)
كل مافعلناه الآن هو عبارة عن إعداد وتمهيد للتجهيز الفعلي للشخصية (Rig)
المحركون
يحتاجون أسهل الأشياء للتلاعب والتحكم في الشخصية , ولا يريدون في نفس
الوقت التعامل مع عناصر صغيرة يضعب إختيارها , أو أنها لا تتحكم في عدة
عناصر في نفس الوقت , وهذا هو المطلوب لخطوة التجهيز (Rig) .
تذكر
أن جميع التجهيزات من الممكن أن تكون مختلفة , ولكن دائما مايكون هناك أسس
لا تتغير للتجهيز , المجهز (الشخص الذي قوم بتجهيز الشخصية للتحريك) سيكون
مسئول عن عمل أعقد التجهيزات الممكنة , ولكنها ستكون سهلة التحريك . دعونا
الآن نلقي نظرة على هذه الأسس .
أولاً سنقوم بفتح Display panel ونقوم بوضع علامة صح أمام Geometry
, وذلك لأخفاء مجسم الشخصية . وإظهار كافة التجهيزات المعمولة سابقاً ,
الآن كل ماتراه الآهو الذي يتحكم كليا في الشخصية . نستطيع البدء الآن .

في نافذة إنشاء العناصر قم بعمل دائرة في منتصف المحيط الظاهر أمامك , وقم بتغيير خصائص الدائرة من نافذة Modify لتكون مرئية في منفذ الرؤية عن طريق وضع علامة صح أمام Render In Viewport

إختر الدائرة الآن وقم بمحاذاتها بأداة المحاذاة Align tool
إلى وسط الشخصية والمتمثل في الأداة المساعدة المكعبة السفلى . وتأكد من
مطابقة خيارات الأداة بالخيارات الموضحة في الصورة التالية .

الآن قم بعمل نسخة من النوع Copy وليس Instance لهذه الدائرة ولتكن أصغر من السابقة وقم بعمل نسختين إضافيتين من الدائرة الصغيرة وبعد ذلك قم بمحاذاتهم مع الـ Helper الملتفة حول الخط المنحني كما فعلنا سابقاً
الآن قم بعمل نسخة إضافية من الدائرة أصغر من الأخيرة وذلك لوضعها بمحاذاة العلامة الزرقاء المتقاطعة عن كل يد .
الآن
اربط كل أداة مساعدة بالدائرة التي حولها بواسطة أداة الربط المستخدمة
سابقاً , واربط كل الدوائر الصغيرة بالدائرة الكبيرة كما بالصورة التالية ,
وقم بعمل ربط للأسهم الصفراء أولاً ثم الخضراء
الآن إذا قمت بتحريك الدائرة الكبيرة كل شئ سوف يتحرك , يمكنك إختبار ذلك الآن , ولكن تأكد من إرجاع كل شئ إلى مكانه بعد ذلك .
قبل أن نكمل يتبقى ربط القدم بالـ IK Solver
لذا سنقوم بإرجاع المجسم المخفي للشخصية من خلال ضغطة الزر الأيمن للفارة ثم Unhide all

الآن وبكل بساطة أنشئ IK من الإصبع إلى القدم , ثم قم بإنشاء أداة مساعدة Dummy من نافذة Helper وقم بوضعها أمام إحدى أقدام أصابع الشخصية .

وكما فعلنا بالسابق سنقوم بعمل ثلاثة نسخ من هذا Dummy ثم محاذاته مع العلامات الزرقاء المتقاطعة بالقدم .

إذا كنت بحاجة إلى إخفاء الشخصية مرة أخرى فافعل ذلك لتستطيع ربط كل Dummy بالعلامة المتقاطعة الخاصة بها كما فعلنا سابقاً .
الآن
سنقوم بإنشاء بعض الأدوات المساعدة في تحريك القدم , فقط قم بإنشاء مستطيل
حول القدمين بنفس خصائص الدائرة من حيث الرؤية في منفذ الماكس . وقم بعمل
نسخة للقدم الأخرى , وللعلم مكان المستطيل في منتهى الأهمية , ومن الضروري
أن تكون كام القدم داخل هذا المستطيل .

الآن سنقوم بالربط ثانية , وهذه المرة سنقوم بربط الـ Dummy الموجودة في كل قدم مع المستطيل الموجود عند تلك القدم , كالشكل الموضح .
قم الآن بتحريك المستطيل للتجد الـDummy والـIk Solver يتبعها , إذن فقد تمت عملية الربط بنجاح
الآن لقد إنتهينا من عمل أول تجهيز لشخصية
شكرا لمتابعتكم ... وإلى اللقاءالآن حان الوقت لعمل IK
إختر أي من الفخذين وقم بالنقر على أداة الـ IK , وسترى ان أداة الـ IK أصبحت نشطة بمجرد إختيار للفخذ .
وباستخدام أداة IK سترى ان هناك خط خفيف متقطع يتبع مؤشر الفارة , وفي إنتظار إختيار سلسلة الحركة العكسية (IK)
لذا
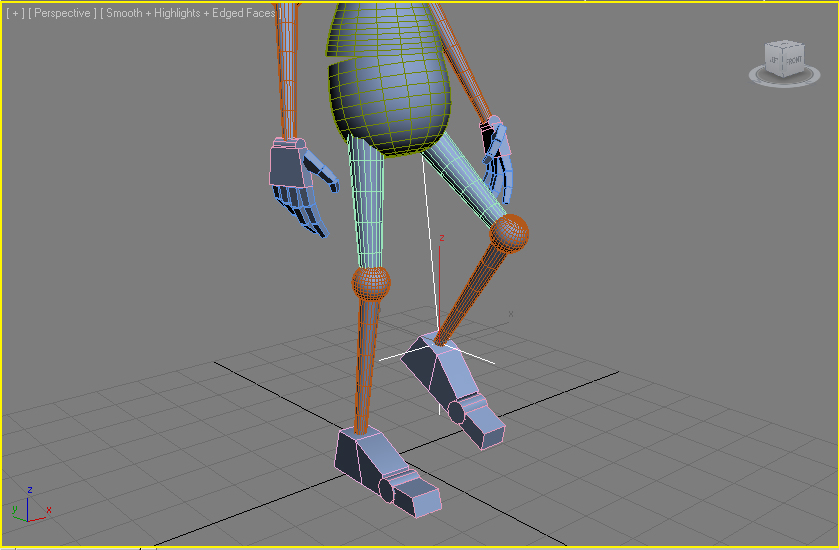
قم الآن بالضغط على القدم الموجودة اسفل الفخذ الذي قمت باختياره سالفاً .
فإذا تم الربط بنجاح ستجد علامة زرقاء متقاطعة ظهرت في مركز دوران القدم ,
سيقوم برنامج الماكس أتوماتيكياً بعد الربط باختيار العلامة المتقاطعة ,
قم الآن بتحريكها للتأكد من نجاح تطبيق الأداة , لا تنسى بعد عمل تحريك
للقدم أن تقوم بالتراجع عن تلك الحركة لترجع القدم إلى مكانا الأساسي من
حيث بدأت .
إفعل الشئ ذاته للقدم الأخرى.
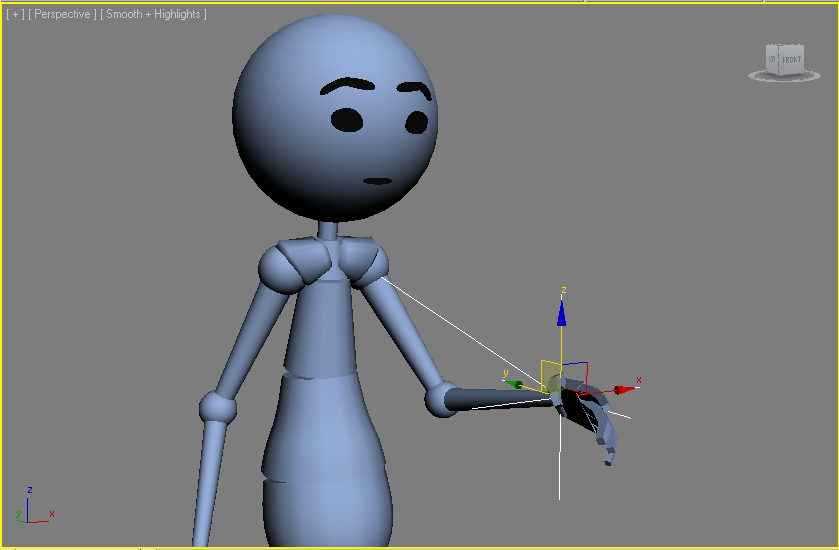
وافعل
الشئ ذاته لكل من الذراعين , وفي هذه المرة , قم اولاً باختيار أعلى
الذراع ثم أختر أداة الحركة العكسية , ثم قم باختيار اليد , وتذكر أن
تختبر حركة اليد بمجرد أن تنتهي من الربط , وبعد ذلك قم بعمل تراجع عن
الحركة لترجع اليد في مكانها الاساسي كما كانت قبل الحركة .
سنتطرق إلى تفاصيل أكثر في نقاط أكثر تفصيلا لمعرفة كيفية استخدام وضبط الحركة العكسية في دقيقة .
بعد إنتهائك من الربط للقدمين والذراعين , الآن نستطيع أن نبدأ في العمود الفقري .
سيكون
هناك إختلاف قليل في طريقة ربط العمود الفقري عن تلك التي نربط بها
القدمين والذراعين , ويرجع ذلك إلى كيفية حركة الفقرات مع بعضها .
ويجب
أن تأخذ في عين الإعتبار أننا لا نستطيع تحريك وثني القدم و الذراع بطريقة
غير طبيعية , بمعنى أن الوصلة لا تسمح بالإنحناء أكثر من 180 درجة (فمن
الطبيعي أنك إذا حركت ذراعك أكثر من ذلك فسيتم كسره) . ولكن في حالة العمود
الفقري لديك حرية أكثر في الحركة من تلك الموجودة في الذراعين , لذلك
نحتاج حل جديد لهذه المنطقة .
ملحوظة: إحفظ الملف
الحركة العكسية باستخدام المنحنيات Spline IK
وهو عبارة عن IK Solver يستخدم المنحنيات ليتحكم في الحركة , دعنا نفهم هذا المعنى أكثر .
إنتقل الآن داخل نوافذ الرؤية إلى الجهة اليسرى , وإذهب إلى قناة الإنشاء Create panel ثم Shapes ثم lines.
ماسنقوم بفعله الآن هو رسم خط يمثل العمود الفقري للشخصية , ولكن قبل أن تبدأ , سنقوم بتغيير بسيط في خصائص الخط في منطقة creation method سنقوم بضبط الإعدادات كما هو موجود في الصورة .
الآن وحين نبدأ برسم الخط , سيقوم الماكس أوتوماتيكيا بتنعيم الخط وذلك بناءا على إعداداتنا السابقة
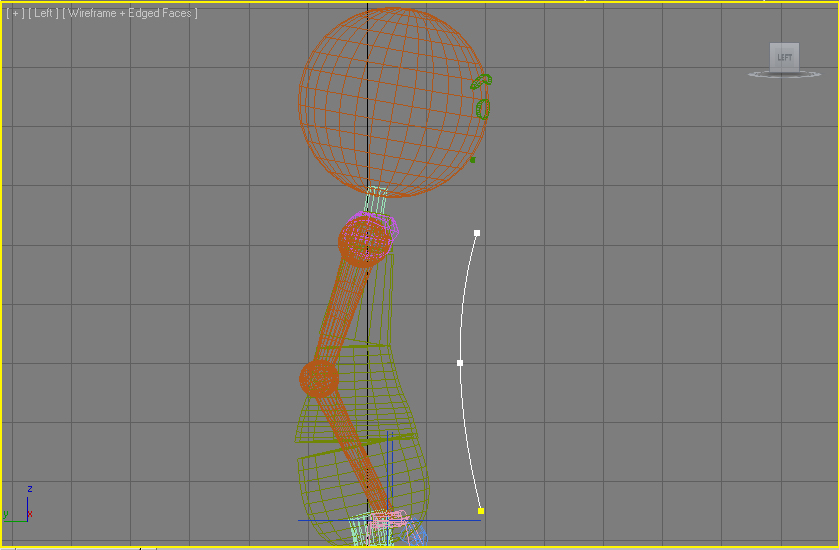
وابدأ الخط من وسط الشخصية (مهم جدا ان تكون نقطة البدأ من هذه المنطقة) وأنشأ الشكل الموضح بالصورة التالية
لاحظ
أنه يوجد ثلاثة نقاط فقط في الشكل المرسوم واحدة للوسط وأخرى لمنتصف
العمود الفقري وثالثة لأعلى العمود الفقري , وهذه ستكون نقاط الإرتكاز
الأساسية للعمود الفقري , فإن كنت تريد نقاط أكثر في الشخصية , قم بذلك ,
ولكن تذكر أنه كلما زادت النقاط كلما زادت العناصر التي تتحكم في هذه
النقاط.
الآن
حرك المنحنى الذي رسمت إلى داخل الشخصية , وتذكر أن ذلك الخط يمثل العمود
الفقري للشخصية لذلك المكان الذي ستضعه فيه داخل الشخصية سيكون هام جداً .
وبالتالي
تأكد من أن المنحنى في مكانه السليم ايضاً من خلال المنفذ الأمامي للرؤية ,
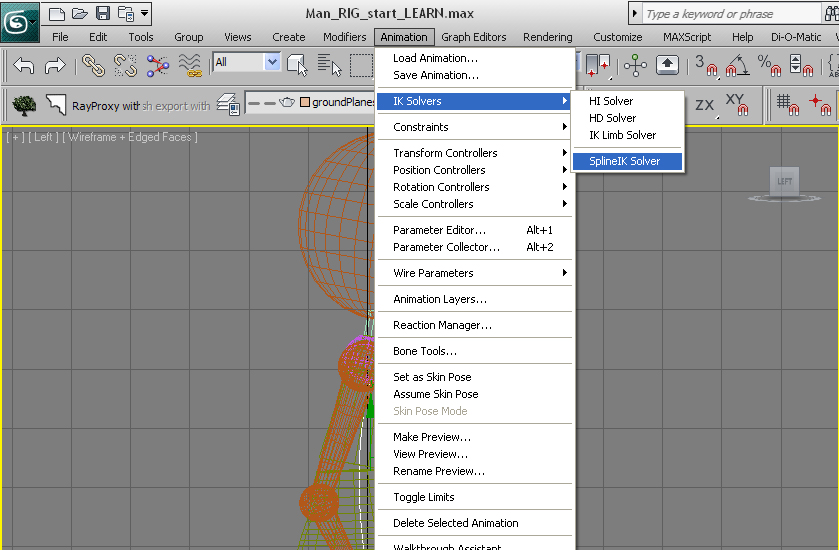
فلابد أن يكون في منتصف الشخصية تماماً , بعد ذلك قم بإختيار الوسط (hips)
الآن قم بإضافة Spline IK Solver وذلك من قائمة Animation ثم IK Solvers ثم Spline IK Solver
الآن حرك الماوس إلى الجزء المسمى Man_Spine_3
, ولمعرفة المسمى للعنصر الذي تقوم عليه يمكنك الإنتظار لثواني عليه
بالماوس فيظهر لك مسمى العنصر الذي ستطبق عليه الربط , وبعد ذلك قم
باختيار الخط المنحنى الذي قمت بعمله منذ قليل داخل الشخصية , ستجد أن
الفقرات الثلاثة الآن تحركت لتلائم الـ IK المطبق عليها , فلا تقلق إن تحركت الفقرات , بل إنه يجب عليها ذلك .
بمجرد إنتهاء الربط بنجاح , ستظهر لك الـعناصر المساعدة (Helper Object)
أوتواتيكياً في أماكن النقاط الموجودة على الخط المنحني الممثل للعمود
الفقري الآن , لذا يمكن الآن ان تتحكم بهذه النقاط بسهولة لتحريك الشخصية .
كل ما نريد فعله الآن هو إنشاء مزيد من الأدوات المساعدة التي سوف تساعدنا في تحريك الشخصية .
ملحوظة: إحفظ الملف
التجهيز (THE RIG)
كل مافعلناه الآن هو عبارة عن إعداد وتمهيد للتجهيز الفعلي للشخصية (Rig)
المحركون
يحتاجون أسهل الأشياء للتلاعب والتحكم في الشخصية , ولا يريدون في نفس
الوقت التعامل مع عناصر صغيرة يضعب إختيارها , أو أنها لا تتحكم في عدة
عناصر في نفس الوقت , وهذا هو المطلوب لخطوة التجهيز (Rig) .
تذكر
أن جميع التجهيزات من الممكن أن تكون مختلفة , ولكن دائما مايكون هناك أسس
لا تتغير للتجهيز , المجهز (الشخص الذي قوم بتجهيز الشخصية للتحريك) سيكون
مسئول عن عمل أعقد التجهيزات الممكنة , ولكنها ستكون سهلة التحريك . دعونا
الآن نلقي نظرة على هذه الأسس .
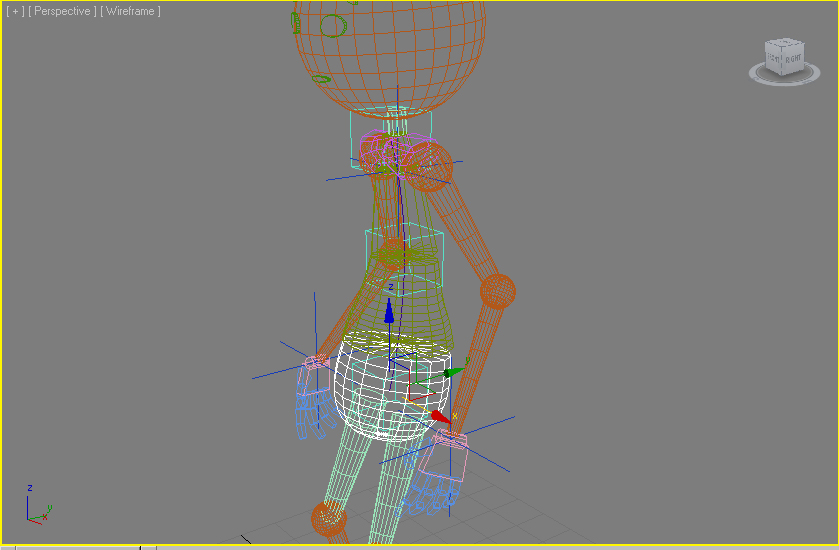
أولاً سنقوم بفتح Display panel ونقوم بوضع علامة صح أمام Geometry
, وذلك لأخفاء مجسم الشخصية . وإظهار كافة التجهيزات المعمولة سابقاً ,
الآن كل ماتراه الآهو الذي يتحكم كليا في الشخصية . نستطيع البدء الآن .
في نافذة إنشاء العناصر قم بعمل دائرة في منتصف المحيط الظاهر أمامك , وقم بتغيير خصائص الدائرة من نافذة Modify لتكون مرئية في منفذ الرؤية عن طريق وضع علامة صح أمام Render In Viewport
إختر الدائرة الآن وقم بمحاذاتها بأداة المحاذاة Align tool
إلى وسط الشخصية والمتمثل في الأداة المساعدة المكعبة السفلى . وتأكد من
مطابقة خيارات الأداة بالخيارات الموضحة في الصورة التالية .
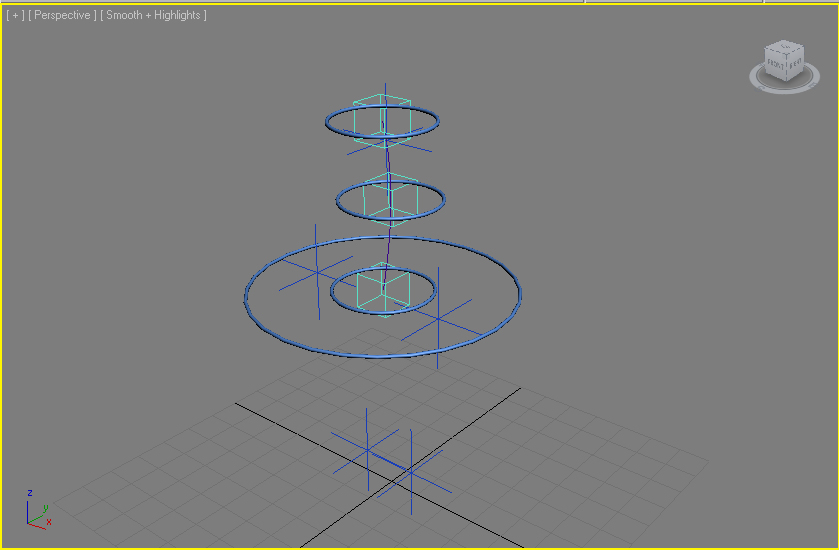
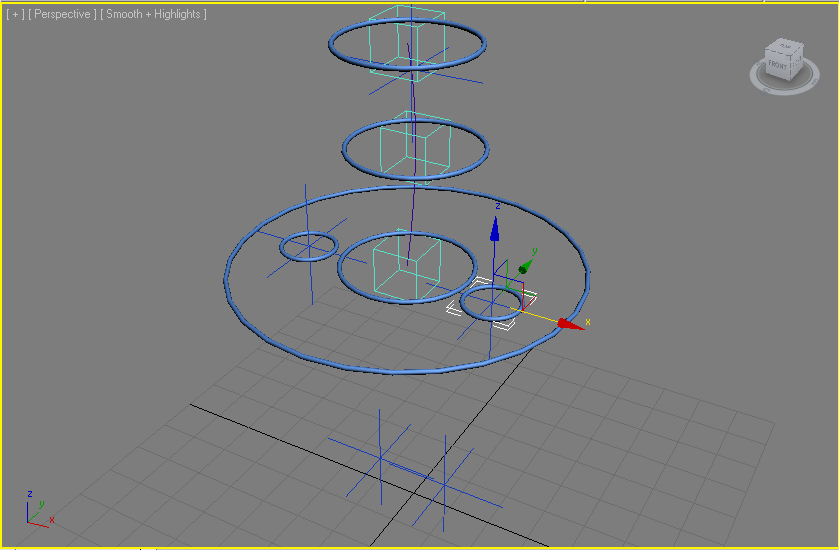
الآن قم بعمل نسخة من النوع Copy وليس Instance لهذه الدائرة ولتكن أصغر من السابقة وقم بعمل نسختين إضافيتين من الدائرة الصغيرة وبعد ذلك قم بمحاذاتهم مع الـ Helper الملتفة حول الخط المنحني كما فعلنا سابقاً
الآن قم بعمل نسخة إضافية من الدائرة أصغر من الأخيرة وذلك لوضعها بمحاذاة العلامة الزرقاء المتقاطعة عن كل يد .
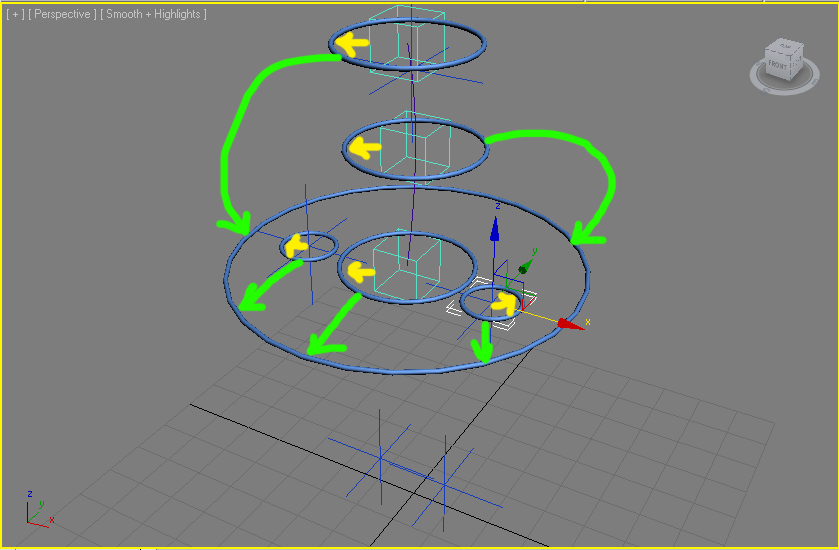
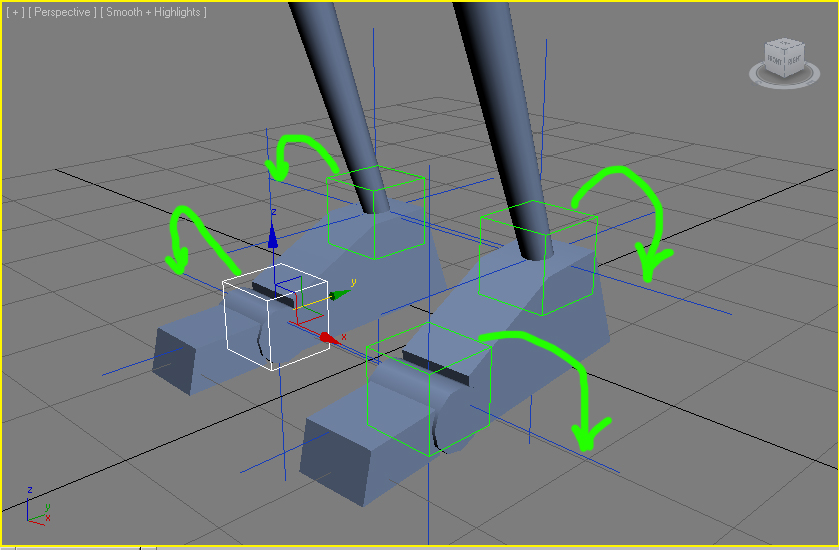
الآن
اربط كل أداة مساعدة بالدائرة التي حولها بواسطة أداة الربط المستخدمة
سابقاً , واربط كل الدوائر الصغيرة بالدائرة الكبيرة كما بالصورة التالية ,
وقم بعمل ربط للأسهم الصفراء أولاً ثم الخضراء
الآن إذا قمت بتحريك الدائرة الكبيرة كل شئ سوف يتحرك , يمكنك إختبار ذلك الآن , ولكن تأكد من إرجاع كل شئ إلى مكانه بعد ذلك .
قبل أن نكمل يتبقى ربط القدم بالـ IK Solver
لذا سنقوم بإرجاع المجسم المخفي للشخصية من خلال ضغطة الزر الأيمن للفارة ثم Unhide all
الآن وبكل بساطة أنشئ IK من الإصبع إلى القدم , ثم قم بإنشاء أداة مساعدة Dummy من نافذة Helper وقم بوضعها أمام إحدى أقدام أصابع الشخصية .
وكما فعلنا بالسابق سنقوم بعمل ثلاثة نسخ من هذا Dummy ثم محاذاته مع العلامات الزرقاء المتقاطعة بالقدم .
إذا كنت بحاجة إلى إخفاء الشخصية مرة أخرى فافعل ذلك لتستطيع ربط كل Dummy بالعلامة المتقاطعة الخاصة بها كما فعلنا سابقاً .
الآن
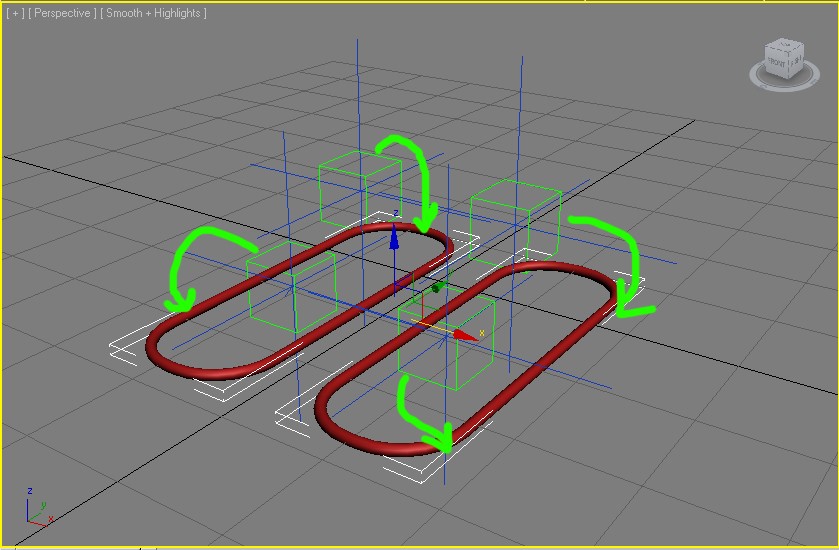
سنقوم بإنشاء بعض الأدوات المساعدة في تحريك القدم , فقط قم بإنشاء مستطيل
حول القدمين بنفس خصائص الدائرة من حيث الرؤية في منفذ الماكس . وقم بعمل
نسخة للقدم الأخرى , وللعلم مكان المستطيل في منتهى الأهمية , ومن الضروري
أن تكون كام القدم داخل هذا المستطيل .
الآن سنقوم بالربط ثانية , وهذه المرة سنقوم بربط الـ Dummy الموجودة في كل قدم مع المستطيل الموجود عند تلك القدم , كالشكل الموضح .
قم الآن بتحريك المستطيل للتجد الـDummy والـIk Solver يتبعها , إذن فقد تمت عملية الربط بنجاح
الآن لقد إنتهينا من عمل أول تجهيز لشخصية
